
As we know binary tree is special type of tree data structure used for data storage purposes. A binary tree has a special condition that each node can have a maximum of two children. There are many types of binary tree. following are common types of binary tree among them :-
i > Full or Strictly Binary Tree
ii > Complete Binary Tree.
iii > Perfect Binary tree.
iv > Balanced Binary Tree.
v > Skewed Binary Tree.
i > Full or strictly Binary Tree :- A Binary Tree is full if every node has 0 or 2 children. We can also say a full binary tree is a binary tree in which all nodes except leaves have two children.Full binary tree is also called as Strictly binary tree.

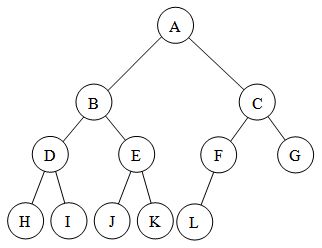
ii > Complete Binary Tree :- A Binary Tree is complete Binary Tree if all levels are completely filled except possibly the last level and All the last level leaf nodes are as left as possible.

Share, Follow and please comment if you find anything incorrect, or to share more information about the topic discussed above.
i > Full or Strictly Binary Tree
ii > Complete Binary Tree.
iii > Perfect Binary tree.
iv > Balanced Binary Tree.
v > Skewed Binary Tree.
i > Full or strictly Binary Tree :- A Binary Tree is full if every node has 0 or 2 children. We can also say a full binary tree is a binary tree in which all nodes except leaves have two children.Full binary tree is also called as Strictly binary tree.
ii > Complete Binary Tree :- A Binary Tree is complete Binary Tree if all levels are completely filled except possibly the last level and All the last level leaf nodes are as left as possible.
iii > Perfect Binary tree :- A Binary tree is Perfect Binary Tree in which all internal nodes have two children and all leaves are at the same level.
iv > Balanced Binary Tree :- It is defined as a binary tree with the worst case height of O(log n) are called balanced binary tree. AVL tree is an example of balanced binary tree.
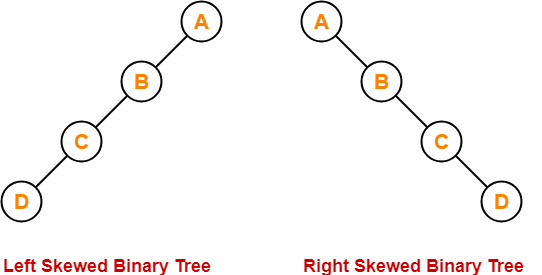
v > Skewed Binary Tree :- A skewed binary tree is a binary tree in which all the nodes except one node has one and only one child and the remaining node has no child. means a skewed binary tree is a binary tree of n nodes such that its depth is (n-1).
FOR BASIC CONCEPT OF TREE DATA STRUCTURE GO THROUGH THIS LINK :- https://priypurnea.blogspot.com/2020/04/basic-concept-of-trees-and-its-type-in.html
Comments
Post a Comment
Please comment.